2021-05-19 17:53发布
最短路经计算分静态最短路计算和动态最短路计算。静态路径最短路径算法是外界环境不变,计算最短路径。主要有Dijkstra算法,A*(A Star)算法。 动态路径最短路是外界环境不断发生变化,即不能计算预测的情况下计算最短路。如在游戏中敌人或障碍物不断移动的情况下。典型的有D*算法。Dijkstra算法是典型最短路算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法能得出最短路径的最优解,但由于它遍历计算的节点很多,所以效率低。Dijkstra算法是很有代表性的最短路算法,在很多专业课程中都作为基本内容有详细的介绍,如数据结构,图论,运筹学等等。Dijkstra一般的表述通常有两种方式,一种用永久和临时标号方式,一种是用OPEN, CLOSE表方式,Drew为了和下面要介绍的 A* 算法和 D* 算法表述一致,这里均采用OPEN,CLOSE表的方式。
博客转载自:https://blog.csdn.net/kongbu0622/article/details/1871520
据 Drew 所知最短路经算法现在重要的应用有计算机网络路由算法,机器人探路,交通路线导航,人工智能,游戏设计等等。美国火星探测器核心的寻路算法就是采用的D*(D Star)算法。最短路经计算分静态最短路计算和动态最短路计算。静态路径最短路径算法是外界环境不变,计算最短路径。主要有Dijkstra算法,A*(A Star)算法。 动态路径最短路是外界环境不断发生变化,即不能计算预测的情况下计算最短路。如在游戏中敌人或障碍物不断移动的情况下。典型的有D*算法。
这是Drew程序实现的10000个节点的随机路网三条互不相交最短路
真实路网计算K条路径示例:节点5696到节点3006,三条最快速路,可以看出路径基本上走环线或主干路。黑线为第一条,兰线为第二条,红线为第三条。约束条件系数为1.2。共享部分路段。 显示计算部分完全由Drew自己开发的程序完成。
参见 K条路算法测试程序
Dijkstra算法求最短路径
Dijkstra算法是典型最短路算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法能得出最短路径的最优解,但由于它遍历计算的节点很多,所以效率低。Dijkstra算法是很有代表性的最短路算法,在很多专业课程中都作为基本内容有详细的介绍,如数据结构,图论,运筹学等等。Dijkstra一般的表述通常有两种方式,一种用永久和临时标号方式,一种是用OPEN, CLOSE表方式,Drew为了和下面要介绍的 A* 算法和 D* 算法表述一致,这里均采用OPEN,CLOSE表的方式。
大概过程:创建两个表,OPEN, CLOSE。OPEN表保存所有已生成而未考察的节点,CLOSED表中记录已访问过的节点。
1. 访问路网中里起始点最近且没有被检查过的点,把这个点放入OPEN组中等待检查。
2. 从OPEN表中找出距起始点最近的点,找出这个点的所有子节点,把这个点放到CLOSE表中。
3. 遍历考察这个点的子节点。求出这些子节点距起始点的距离值,放子节点到OPEN表中。
4. 重复2,3,步。直到OPEN表为空,或找到目标点。
这是在drew 程序中4000个节点的随机路网上Dijkstra算法搜索最短路的演示,黑色圆圈表示经过遍历计算过的点由图中可以看到Dijkstra算法从起始点开始向周围层层计算扩展,在计算大量节点后,到达目标点。所以速度慢效率低。提高Dijkstra搜索速度的方法很多,据Drew所知,常用的有数据结构采用Binary heap的方法,和用Dijkstra从起始点和终点同时搜索的方法。
推荐网页:http://www.cs.ecnu.edu.cn/assist/js04/ZJS045/ZJS04505/zjs045050a.htm,简明扼要介绍Dijkstra算法,有图解显示和源码下载。
A*算法 -- 启发式(heuristic)算法
A*(A-Star)算法是一种静态路网中求解最短路最有效的方法。公式表示为:
f(n)=g(n)+h(n)
其中f(n) 是节点n从初始点到目标点的估价函数,g(n) 是在状态空间中从初始节点到n节点的实际代价,h(n)是从n到目标节点最佳路径的估计代价。保证找到最短路径(最优解的)条件,关键在于估价函数h(n)的选取:估价值h(n) <= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。但能得到最优解。如果 估价值 > 实际值, 搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。估价值与实际值越接近,估价函数取得就越好。
例如对于几何路网来说,可以取两节点间欧几理德距离(直线距离)做为估价值,即f=g(n)+sqrt((dx-nx)*(dx-nx)+(dy-ny)*(dy-ny));这样估价函数f在g值一定的情况下,会或多或少的受估价值h的制约,节点距目标点近,h值小,f值相对就小,能保证最短路的搜索向终点的方向进行。明显优于Dijstra算法的毫无无方向的向四周搜索。
主要搜索过程:创建两个表,OPEN表保存所有已生成而未考察的节点,CLOSED表中记录已访问过的节点。遍历当前节点的各个节点,将n节点放入CLOSE中,取n节点的子节点X并算X的估价值。
While(OPEN != NULL)
{
从OPEN表中取估价值f最小的节点n;
if
(n节点 == 目标节点)
break
;
else
(X in OPEN) 比较两个X的估价值f
//注意是同一个节点的两个不同路径的估价值
( X的估价值小于OPEN表的估价值 )
更新OPEN表中的估价值;
//取最小路径的估价值
(X in CLOSE) 比较两个X的估价值
( X的估价值小于CLOSE表的估价值 )
更新CLOSE表中的估价值; 把X节点放入OPEN
(X not in both)
求X的估价值;
并将X插入OPEN表中;
//还没有排序
}
将n节点插入CLOSE表中;
按照估价值将OPEN表中的节点排序;
//实际上是比较OPEN表内节点f的大小,从最小路径的节点向下进行。
上图是和上面Dijkstra算法使用同一个路网,相同的起点终点,用A*算法的情况,计算的点数从起始点逐渐向目标点方向扩展,计算的节点数量明显比Dijkstra少得多,效率很高,且能得到最优解。A*算法和Dijistra算法的区别在于有无估价值,Dijistra算法相当于A*算法中估价值为0的情况。
推荐文章链接:Amit 斯坦福大学一个博士的游戏网站,上面有关于A*算法介绍和不少有价值的链接 http://theory.stanford.edu/~amitp/GameProgramming/
Sunway写的两篇很好的介绍启发式和A*算法的中文文章并有A*源码下载:初识A*算法 http://creativesoft.home.shangdu.net/AStart1.htm和深入A*算法 http://creativesoft.home.shangdu.net/AStart2.htm
需要注意的是Sunway上面文章“深入A*算法”中引用了一个A*的游戏程序进行讲解,并有这个源码的下载,不过它有一个不小的Bug, 就是新的子节点放入OPEN表中进行了排序,而当子节点在Open表和Closed表中时,重新计算估价值后,没有重新的对Open表中的节点排序,这个问题会导致计算有时得不到最优解,另外在路网权重悬殊很大时,搜索范围不但超过Dijkstra,甚至搜索全部路网, 使效率大大降低。Drew 对这个问题进行了如下修正,当子节点在Open表和Closed表中时,重新计算估价值后,删除OPEN表中的老的节点,将有新估价值的节点插入OPEN表中,重新排序,经测试效果良好,修改的代码如下,红色部分为Drew添加的代码.添加进程序的相应部分即可。
在函数GenerateSucc()中 ...................................
g=BestNode->g+1;
/* g(Successor)=g(BestNode)+cost of getting from BestNode to Successor */
TileNumS=TileNum((
int
)x,(
)y);
/* identification purposes */
((Old=CheckOPEN(TileNumS)) != NULL)
for
(c=0;c<8>
(BestNode->Child[c] == NULL)
/* Add Old to the list of BestNode's Children (or Successors). */
BestNode->Child[c]=Old;
(g < Old>g)
Old->Parent=BestNode;
Old->g=g;
Old->f=g+Old->h;
//Drew 在该处添加如下红色代码
//Implement by Drew
NODE *q,*p=OPEN->NextNode, *temp=OPEN->NextNode;
while
(p!=NULL && p->NodeNum != Old->NodeNum)
q=p;
p=p->NextNode;
(p->NodeNum == Old->NodeNum)
(p==OPEN->NextNode)
temp = temp->NextNode;
OPEN ->NextNode = temp;
q->NextNode = p->NextNode;
Insert(Old);
// Insert Successor on OPEN list wrt f
......................................................
A*(A Star)算法与D算法的转换
这种算法可以不直接用估价值,直接用Dijkstra算法程序实现A*算法,Drew对它进行了测试,达到和A*完全一样的计算效果,且非常简单。以邻接矩阵为例,更改原来邻接矩阵i行j列元素Dij为 Dij+Djq-Diq; 起始点到目标点的方向i->j, 终点q. Dij为(i到j路段的权重或距离)其中:Djq,Diq的作用相当于估价值 Djq=(j到q的直线距离);Diq=(i到q的直线距离)原理:i 到q方向符合Dij+Djq > Diq ,取Dij+Djq-Diq 小,如果是相反方向Dij+Djq-Diq会很大。因此达到向目标方向寻路的作用。
动态路网 -- 最短路径算法 D*
A* 在静态路网中非常有效(very efficient for static worlds),但不适于在动态路网,环境如权重等不断变化的动态环境下。 D*是动态A*(D-Star,Dynamic A Star) 卡内及梅隆机器人中心的Stentz在1994和1995年两篇文章提出,主要用于机器人探路。是火星探测器采用的寻路算法,见附录1,2.
主要方法(这些完全是Drew在读了上述资料和编制程序中的个人理解,不能保证完全正确,仅供参考)
1.
先用Dijstra算法从目标节点G向起始节点搜索。储存路网中目标点到各个节点的最短路和该位置到目标点的实际值h,k(k为所有变化h之中最小的值,
当前为k
=
h。每个节点包含上一节点到目标点的最短路信息
1
(
2
),
5
4
),
(
7
)。则
到
的最短路为
-
。原
OPEN
和CLOSE中节点信息保存。
2.
机器人沿最短路开始移动,在移动的下一节点没有变化时,无需计算,利用上一步Dijstra计算出的最短路信息从出发点向后追述即可,当在Y点探测
到下一节点X状态发生改变,如堵塞。机器人首先调整自己在当前位置Y到目标点G的实际值h(Y),h(Y)
X到Y的新权值c(X,Y)
+
X的原实际值h(X).X为下一
节点(到目标点方向Y
>X
>G),Y是当前点。k值取h值变化前后的最小。
3.
用A
*
或其它算法计算,这里假设用A
算法,遍历Y的子节点,点放入CLOSE,调整Y的子节点a的h值,h(a)
h(Y)
Y到子节点a的权重C(Y,a),比较a点是否存
在于
和CLOSE中,方法如下:
()
从OPEN表中取k值最小的节点Y;
遍历Y的子节点a,计算a的h值 h(a)=h(Y)+Y到子节点a的权重C(Y,a)
(a in OPEN) 比较两个a的h值
( a的h值小于OPEN表a的h值 )
更新OPEN表中a的h值;k值取最小的h值
有未受影响的最短路经存在
(a in CLOSE) 比较两个a的h值
( a的h值小于CLOSE表的h值 )
更新CLOSE表中a的h值; k值取最小的h值;将a节点放入OPEN表
(a not in both)
将a插入OPEN表中;
放Y到CLOSE表;
OPEN表比较k值大小进行排序;
机器人利用第一步Dijstra计算出的最短路信息从a点到目标点的最短路经进行。
D*算法在动态环境中寻路非常有效,向目标点移动中,只检查最短路径上下一节点或临近节点的变化情况,如机器人寻路等情况。对于距离远的最短路径上发生的变化,则感觉不太适用。
上图是Drew在4000个节点的随机路网上做的分析演示,细黑线为第一次计算出的最短路,红点部分为路径上发生变化的堵塞点,当机器人位于982点时,检测到前面发生路段堵塞,在该点重新根据新的信息计算路径,可以看到圆圈点为重新计算遍历过的点,仅仅计算了很少得点就找到了最短路,说明计算非常有效,迅速。绿线为计算出的绕开堵塞部分的新的最短路径。
实现自动寻路的算法有多种,深度优先,A*寻路等,这里介绍下A*寻路算法
在学习A*算法之前,很好奇的是A*为什么叫做A*。在知乎上找到一个回答,大致意思是说,在A*算法之前有一种基于启发式探索的方法来提高Dijkstra算法的速度,这个算法叫做A1。后来的改进算法被称为A*。*这个符号是从统计文献中借鉴来的,用来表示相对一个旧有标准的最优估计。
启发式探索是利用问题拥有的启发信息来引导搜索,达到减少探索范围,降低问题复杂度的目的。
A*寻路算法就是启发式探索的一个典型实践,在寻路的过程中,给每个节点绑定了一个估计值(即启发式),在对节点的遍历过程中是采取估计值优先原则,估计值更优的节点会被优先遍历。所以估计函数的定义十分重要,显著影响算法效率。
将待搜索的区域简化成一个个小方格,最终找到的路径就是一些小方格的组合。当然是可以划分成任意形状,甚至是精确到每一个像素点,这完全取决于你的游戏的需求。一般情况下划分成方格就可以满足我们的需求,同时也便于计算。如下图区域,被简化成6*6的小方格。其中绿色表示起点,红色表示终点,黑色表示路障,不能通行。
先描述A*算法的大致过程:
将初始节点放入到open列表中。
判断open列表。如果为空,则搜索失败。如果open列表中存在目标节点,则搜索成功。
从open列表中取出F值最小的节点作为当前节点,并将其加入到close列表中。
计算当前节点的相邻的所有可到达节点,生成一组子节点。对于每一个子节点:
如果该节点在close列表中,则丢弃它
如果该节点在open列表中,则检查其通过当前节点计算得到的F值是否更小,如果更小则更新其F值,并将其父节点设置为当前节点。
如果该节点不在open列表中,则将其加入到open列表,并计算F值,设置其父节点为当前节点。
转到2步骤
初始节点,目标节点,分别表示路径的起点和终点,相当于上图的绿色节点和红色节点F值,就是前面提到的启发式,每个节点都会被绑定一个F值F值是一个估计值,用F(n) = G(n) + H(n) 表示,其中G(n)表示由起点到节点n的预估消耗,H(n)表示节点n到终点的估计消耗。H(n)的计算方式有很多种,比如曼哈顿H(n) = x + y,或者欧几里得式H(n) = sqrt(x^2 + y^2)。本例中采用曼哈顿式。F(n)就表示由起点经过n节点到达终点的总消耗为了便于描述,本文在每个方格的左下角标注数字表示G(n),右下角数字表示H(n),左上方数字表示F(n)。具体如何计算请看下面的一个例子
接下来,我们严格按照A*算法找出从绿色节点到红色节点的最佳路径首先将绿色节点加入到open列表中接着判断open列表不为空(有起始节点),红色节点不在open列表中然后从open列表中取出F值最小的节点,此时,open列表中只有绿色节点,所以将绿色节点取出,作为当前节点,并将其加入到close列表中计算绿色节点的相邻节点(暂不考虑斜方向移动),如下图所示的所有灰色节点,并计算它们的F值。这些子节点既没有在open列表中,也没有在close列表中,所以都加入到open列表中,并设置它们的父节点为绿色节点
F值计算方式:以绿色节点右边的灰色节点为例G(n) = 1,从绿色节点移动到该节点,都只需要消耗1步H(n) = 3,其移动到红色节点需要消耗横向2步,竖向一步,所以共消耗3步(曼哈顿式)F(n) = 4 = G(n) + H(n)
试着算一下其他灰色节点的F值吧,看看与图上标注的是否一致
继续选择open列表中F值最小的节点,此时最小节点有两个,都为4。这种情况下选取哪一个都是一样的,不会影响搜索算法的效率。因为启发式相同。这个例子中按照右下左上的顺序选取(这样可以少画几张图(T▽T))。先选择绿色节点右边的节点为当前节点,并将其加入close列表。其相邻4个节点中,有1个是黑色节点不可达,绿色节点已经被加入close列表,还剩下上下两个相邻节点,分别计算其F值,并设置他们的父节点为黄色节点。
此时open列表中F值最小为4,继续选取下方节点,计算其相邻节点。其右侧是黑色节点,上方1号节点在close列表。下方节点是新扩展的。主要来看左侧节点,它已经在open列表中了。根据算法我们要重新计算它的F值,按经过2号节点计算G(n) = 3,H(n)不变,所以F(n) = 6相比于原值反而变大了,所以什么也不做。(后面的步骤中重新计算F值都不会更小,不再赘述)
此时open列表中F值最小仍为4,继续选取
此时open列表中F值最小为6,优先选取下方节点
此时open列表中F值最小为6,优先选取右方节点
此时我们发现红色节点已经被添加到open列表中,算法结束。从红色节点开始逆推,其父节点为7号,7号父节点为6号,6号父节点为5号,5号父节点为2号(注意这里5号的父节点是2号,因为5号是被2号加入到open列表中的,且一直未被更新),2号父节点为1号,最终得到检索路径为:绿色-1-2-5-6-7-红色
A*实现的
第一步:对着Assets点击右键,选择ExportPackage第二步:选择场景文件以及和场景相关的资源或者素材,然后点击Export第三步:给导出的资源取名,并且选择要保存的位置即可
玩游戏玩的很好,说明你对于游戏里面的规则、剧情设置还是比较了解的,对于从事游戏相关岗位来说也是优势之一。但是学习游戏开发还是要对游戏开发的工作内容做进一步的了解,游戏开发涉及代码较多,可以通过进一步的了解,判断自己是否适合学习这个方向,另外...
游戏开发入门不难。后期发展需要你有丰富的奇思妙想。游戏开发肯定是培训好,自学学得不系统,并且不易发现自身薄弱之处。游戏开发的学习时长还是要看你自己对知识与技术的掌握能力,一般来说,游戏开发的学习时长大约在五个月左右。...
个人觉得如果有一定的技术基础的话还是可以考虑自学,如果零基础的话可能会有些难度
问题还是出在粒子的sorting fudge。在unity的2d模式下,游戏本身的背景相当于是sorting fudge的0,当你把粒子的sorting fudge设为0以上的时候,粒子就都会被背景盖住。所以在3d模式下给alpha正值来给add垫底的话,到了2d模式下就会通通不显示。所以遇上这样的...
虚幻4引擎,你会看到和平精英加载页面左下角有这个图标。
转载知乎上的两位答友的回答,各有道理。作者:风小锐链接:https://www.zhihu.com/question/322249959/answer/675883379来源:知乎著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。未来Unity有可能出现3A大作吗? 有可能。基于Unity已...
在Assets文件夹里面.点击右键Create/Material即可以创建材质球
可以让模型师直接作出这样的形状,如果用纯Unity制作,就要用基本游戏对象拼接了,包括楼梯,城堡,都可以拼接出来。正常情况不会这样做,因为不够精美,都是建模师来实现,毕竟Unity不属于专业的建模软件,侧重于实现功能。...
粒子系统由粒子发射器、粒子动画器和粒子渲染器三部分组成,主要用于游戏场景中一些特殊效果,如水、烟火等等
首先,Python开发游戏非常尴尬,原因是没有好用的游戏开发库。Python开发游戏仅推荐PyGame,PyGame是对多年以前很流行的游戏开发库——SDL的封装。但是说实话功能太简陋了,做个动画都得考虑刷新的问题。楼主要做简单小游戏,只需要画一两周熟悉Unity引擎,然...
1.标记水体碰撞的位置2.计算水波的传递 通过波动公式,3D或者2D 波动公式都行3.水面顶点采样波动传递结果计算结果做顶点Y轴偏移
Unity3D中两种阴影的实现传统的ShadowMapShadowMap说起来十分简单,把摄像机和光源的位置重叠,那么场景中该光源的阴影区域就是那些摄像机看不到的地方,主要应用在前向渲染路径中。具体实现分以下几个步骤:如果有平行光开启了阴影,Unity就会为该光源计算它...
Doozy UI是Unity UI视图层的框架,本身使用的还是UGUI的组件,但提供了一套强大的UI管理功能,可以很方便的实现一些炫酷效果,方便的UI系统管理与事件传递机制。
Unity3d更好,因为U3D占有的市场更大,目前cocos大都是用来开发棋牌游戏的,在这方面它有着巨大的优势。而Unity3d既可以用来开发大型3D游戏,也可以用来开发vr游戏、vr应用,这是比较不错的,未来有着巨大的前景。另外ue4也是个不错的选择,近年来用ue4开发的...
当Unity 需要做热更新的时候(2013年开始),而普通的C#又做不到的时候,而对于游戏行业来说Lua脚本热更新已经是很成熟的方案,自然Lua 热更新就成为了Unity热更新的首选。
最多设置5个标签!
{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','/static/images/logo.png', '推荐 逃避全世界 的问题《自动寻路需要通过什么算法来实现?》','http://www.shouhuola.com/q-36280.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
最短路经计算分静态最短路计算和动态最短路计算。静态路径最短路径算法是外界环境不变,计算最短路径。主要有Dijkstra算法,A*(A Star)算法。 动态路径最短路是外界环境不断发生变化,即不能计算预测的情况下计算最短路。如在游戏中敌人或障碍物不断移动的情况下。典型的有D*算法。Dijkstra算法是典型最短路算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法能得出最短路径的最优解,但由于它遍历计算的节点很多,所以效率低。Dijkstra算法是很有代表性的最短路算法,在很多专业课程中都作为基本内容有详细的介绍,如数据结构,图论,运筹学等等。Dijkstra一般的表述通常有两种方式,一种用永久和临时标号方式,一种是用OPEN, CLOSE表方式,Drew为了和下面要介绍的 A* 算法和 D* 算法表述一致,这里均采用OPEN,CLOSE表的方式。
人工智能: 自动寻路算法实现(四、D、D*算法)
博客转载自:https://blog.csdn.net/kongbu0622/article/details/1871520
据 Drew 所知最短路经算法现在重要的应用有计算机网络路由算法,机器人探路,交通路线导航,人工智能,游戏设计等等。美国火星探测器核心的寻路算法就是采用的D*(D Star)算法。最短路经计算分静态最短路计算和动态最短路计算。静态路径最短路径算法是外界环境不变,计算最短路径。主要有Dijkstra算法,A*(A Star)算法。 动态路径最短路是外界环境不断发生变化,即不能计算预测的情况下计算最短路。如在游戏中敌人或障碍物不断移动的情况下。典型的有D*算法。
这是Drew程序实现的10000个节点的随机路网三条互不相交最短路
真实路网计算K条路径示例:节点5696到节点3006,三条最快速路,可以看出路径基本上走环线或主干路。黑线为第一条,兰线为第二条,红线为第三条。约束条件系数为1.2。共享部分路段。 显示计算部分完全由Drew自己开发的程序完成。
参见 K条路算法测试程序
Dijkstra算法求最短路径
Dijkstra算法是典型最短路算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法能得出最短路径的最优解,但由于它遍历计算的节点很多,所以效率低。Dijkstra算法是很有代表性的最短路算法,在很多专业课程中都作为基本内容有详细的介绍,如数据结构,图论,运筹学等等。Dijkstra一般的表述通常有两种方式,一种用永久和临时标号方式,一种是用OPEN, CLOSE表方式,Drew为了和下面要介绍的 A* 算法和 D* 算法表述一致,这里均采用OPEN,CLOSE表的方式。
大概过程:
创建两个表,OPEN, CLOSE。OPEN表保存所有已生成而未考察的节点,CLOSED表中记录已访问过的节点。
1. 访问路网中里起始点最近且没有被检查过的点,把这个点放入OPEN组中等待检查。2. 从OPEN表中找出距起始点最近的点,找出这个点的所有子节点,把这个点放到CLOSE表中。3. 遍历考察这个点的子节点。求出这些子节点距起始点的距离值,放子节点到OPEN表中。4. 重复2,3,步。直到OPEN表为空,或找到目标点。这是在drew 程序中4000个节点的随机路网上Dijkstra算法搜索最短路的演示,黑色圆圈表示经过遍历计算过的点由图中可以看到Dijkstra算法从起始点开始向周围层层计算扩展,在计算大量节点后,到达目标点。所以速度慢效率低。提高Dijkstra搜索速度的方法很多,据Drew所知,常用的有数据结构采用Binary heap的方法,和用Dijkstra从起始点和终点同时搜索的方法。
推荐网页:http://www.cs.ecnu.edu.cn/assist/js04/ZJS045/ZJS04505/zjs045050a.htm,简明扼要介绍Dijkstra算法,有图解显示和源码下载。
A*算法 -- 启发式(heuristic)算法
A*(A-Star)算法是一种静态路网中求解最短路最有效的方法。公式表示为:
f(n)=g(n)+h(n)其中f(n) 是节点n从初始点到目标点的估价函数,g(n) 是在状态空间中从初始节点到n节点的实际代价,h(n)是从n到目标节点最佳路径的估计代价。保证找到最短路径(最优解的)条件,关键在于估价函数h(n)的选取:估价值h(n) <= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。但能得到最优解。如果 估价值 > 实际值, 搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。估价值与实际值越接近,估价函数取得就越好。
例如对于几何路网来说,可以取两节点间欧几理德距离(直线距离)做为估价值,即f=g(n)+sqrt((dx-nx)*(dx-nx)+(dy-ny)*(dy-ny));这样估价函数f在g值一定的情况下,会或多或少的受估价值h的制约,节点距目标点近,h值小,f值相对就小,能保证最短路的搜索向终点的方向进行。明显优于Dijstra算法的毫无无方向的向四周搜索。
主要搜索过程:
创建两个表,OPEN表保存所有已生成而未考察的节点,CLOSED表中记录已访问过的节点。遍历当前节点的各个节点,将n节点放入CLOSE中,取n节点的子节点X并算X的估价值。
While(OPEN != NULL){从OPEN表中取估价值f最小的节点n;if(n节点 == 目标节点)
break;else{if(X in OPEN) 比较两个X的估价值f//注意是同一个节点的两个不同路径的估价值if( X的估价值小于OPEN表的估价值 )更新OPEN表中的估价值;//取最小路径的估价值if(X in CLOSE) 比较两个X的估价值//注意是同一个节点的两个不同路径的估价值if( X的估价值小于CLOSE表的估价值 )更新CLOSE表中的估价值; 把X节点放入OPEN//取最小路径的估价值if(X not in both)求X的估价值;并将X插入OPEN表中;//还没有排序}将n节点插入CLOSE表中;按照估价值将OPEN表中的节点排序;//实际上是比较OPEN表内节点f的大小,从最小路径的节点向下进行。}上图是和上面Dijkstra算法使用同一个路网,相同的起点终点,用A*算法的情况,计算的点数从起始点逐渐向目标点方向扩展,计算的节点数量明显比Dijkstra少得多,效率很高,且能得到最优解。A*算法和Dijistra算法的区别在于有无估价值,Dijistra算法相当于A*算法中估价值为0的情况。
推荐文章链接:Amit 斯坦福大学一个博士的游戏网站,上面有关于A*算法介绍和不少有价值的链接 http://theory.stanford.edu/~amitp/GameProgramming/
Sunway写的两篇很好的介绍启发式和A*算法的中文文章并有A*源码下载:初识A*算法 http://creativesoft.home.shangdu.net/AStart1.htm和深入A*算法 http://creativesoft.home.shangdu.net/AStart2.htm
需要注意的是Sunway上面文章“深入A*算法”中引用了一个A*的游戏程序进行讲解,并有这个源码的下载,不过它有一个不小的Bug, 就是新的子节点放入OPEN表中进行了排序,而当子节点在Open表和Closed表中时,重新计算估价值后,没有重新的对Open表中的节点排序,这个问题会导致计算有时得不到最优解,另外在路网权重悬殊很大时,搜索范围不但超过Dijkstra,甚至搜索全部路网, 使效率大大降低。Drew 对这个问题进行了如下修正,当子节点在Open表和Closed表中时,重新计算估价值后,删除OPEN表中的老的节点,将有新估价值的节点插入OPEN表中,重新排序,经测试效果良好,修改的代码如下,红色部分为Drew添加的代码.添加进程序的相应部分即可。
在函数GenerateSucc()中 ...................................
g=BestNode->g+1;/* g(Successor)=g(BestNode)+cost of getting from BestNode to Successor */TileNumS=TileNum((int)x,(int)y);/* identification purposes */if((Old=CheckOPEN(TileNumS)) != NULL){for(c=0;c<8>if(BestNode->Child[c] == NULL)/* Add Old to the list of BestNode's Children (or Successors). */break;BestNode->Child[c]=Old;if(g < Old>g){Old->Parent=BestNode;Old->g=g;Old->f=g+Old->h;//Drew 在该处添加如下红色代码//Implement by DrewNODE *q,*p=OPEN->NextNode, *temp=OPEN->NextNode;while(p!=NULL && p->NodeNum != Old->NodeNum){q=p;p=p->NextNode;}if(p->NodeNum == Old->NodeNum){if(p==OPEN->NextNode){temp = temp->NextNode;OPEN ->NextNode = temp;}elseq->NextNode = p->NextNode;}Insert(Old);// Insert Successor on OPEN list wrt f}......................................................
A*(A Star)算法与D算法的转换
这种算法可以不直接用估价值,直接用Dijkstra算法程序实现A*算法,Drew对它进行了测试,达到和A*完全一样的计算效果,且非常简单。以邻接矩阵为例,更改原来邻接矩阵i行j列元素Dij为 Dij+Djq-Diq; 起始点到目标点的方向i->j, 终点q. Dij为(i到j路段的权重或距离)其中:Djq,Diq的作用相当于估价值 Djq=(j到q的直线距离);Diq=(i到q的直线距离)原理:i 到q方向符合Dij+Djq > Diq ,取Dij+Djq-Diq 小,如果是相反方向Dij+Djq-Diq会很大。因此达到向目标方向寻路的作用。
动态路网 -- 最短路径算法 D*
A* 在静态路网中非常有效(very efficient for static worlds),但不适于在动态路网,环境如权重等不断变化的动态环境下。 D*是动态A*(D-Star,Dynamic A Star) 卡内及梅隆机器人中心的Stentz在1994和1995年两篇文章提出,主要用于机器人探路。是火星探测器采用的寻路算法,见附录1,2.
主要方法(这些完全是Drew在读了上述资料和编制程序中的个人理解,不能保证完全正确,仅供参考)
1.先用Dijstra算法从目标节点G向起始节点搜索。储存路网中目标点到各个节点的最短路和该位置到目标点的实际值h,k(k为所有变化h之中最小的值,当前为k=h。每个节点包含上一节点到目标点的最短路信息1(2),2(5),5(4),4(7)。则1到4的最短路为1-2-5-4。原OPEN和CLOSE中节点信息保存。2.机器人沿最短路开始移动,在移动的下一节点没有变化时,无需计算,利用上一步Dijstra计算出的最短路信息从出发点向后追述即可,当在Y点探测到下一节点X状态发生改变,如堵塞。机器人首先调整自己在当前位置Y到目标点G的实际值h(Y),h(Y)=X到Y的新权值c(X,Y)+X的原实际值h(X).X为下一节点(到目标点方向Y->X->G),Y是当前点。k值取h值变化前后的最小。3.用A*或其它算法计算,这里假设用A*算法,遍历Y的子节点,点放入CLOSE,调整Y的子节点a的h值,h(a)=h(Y)+Y到子节点a的权重C(Y,a),比较a点是否存在于OPEN和CLOSE中,方法如下:while(){从OPEN表中取k值最小的节点Y;遍历Y的子节点a,计算a的h值 h(a)=h(Y)+Y到子节点a的权重C(Y,a){if(a in OPEN) 比较两个a的h值if( a的h值小于OPEN表a的h值 ){更新OPEN表中a的h值;k值取最小的h值有未受影响的最短路经存在break;}if(a in CLOSE) 比较两个a的h值//注意是同一个节点的两个不同路径的估价值if( a的h值小于CLOSE表的h值 ){更新CLOSE表中a的h值; k值取最小的h值;将a节点放入OPEN表有未受影响的最短路经存在break;}if(a not in both)将a插入OPEN表中;//还没有排序}放Y到CLOSE表;OPEN表比较k值大小进行排序;}机器人利用第一步Dijstra计算出的最短路信息从a点到目标点的最短路经进行。D*算法在动态环境中寻路非常有效,向目标点移动中,只检查最短路径上下一节点或临近节点的变化情况,如机器人寻路等情况。对于距离远的最短路径上发生的变化,则感觉不太适用。
上图是Drew在4000个节点的随机路网上做的分析演示,细黑线为第一次计算出的最短路,红点部分为路径上发生变化的堵塞点,当机器人位于982点时,检测到前面发生路段堵塞,在该点重新根据新的信息计算路径,可以看到圆圈点为重新计算遍历过的点,仅仅计算了很少得点就找到了最短路,说明计算非常有效,迅速。绿线为计算出的绕开堵塞部分的新的最短路径。
实现自动寻路的算法有多种,深度优先,A*寻路等,这里介绍下A*寻路算法
在学习A*算法之前,很好奇的是A*为什么叫做A*。在知乎上找到一个回答,大致意思是说,在A*算法之前有一种基于启发式探索的方法来提高Dijkstra算法的速度,这个算法叫做A1。后来的改进算法被称为A*。*这个符号是从统计文献中借鉴来的,用来表示相对一个旧有标准的最优估计。
A*寻路算法就是启发式探索的一个典型实践,在寻路的过程中,给每个节点绑定了一个估计值(即启发式),在对节点的遍历过程中是采取估计值优先原则,估计值更优的节点会被优先遍历。所以估计函数的定义十分重要,显著影响算法效率。
A*算法描述
简化搜索区域
将待搜索的区域简化成一个个小方格,最终找到的路径就是一些小方格的组合。当然是可以划分成任意形状,甚至是精确到每一个像素点,这完全取决于你的游戏的需求。一般情况下划分成方格就可以满足我们的需求,同时也便于计算。
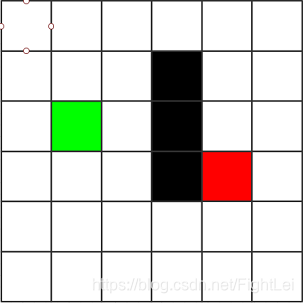
如下图区域,被简化成6*6的小方格。其中绿色表示起点,红色表示终点,黑色表示路障,不能通行。
概述算法步骤
先描述A*算法的大致过程:
将初始节点放入到open列表中。
判断open列表。如果为空,则搜索失败。如果open列表中存在目标节点,则搜索成功。
从open列表中取出F值最小的节点作为当前节点,并将其加入到close列表中。
计算当前节点的相邻的所有可到达节点,生成一组子节点。对于每一个子节点:
如果该节点在close列表中,则丢弃它
如果该节点在open列表中,则检查其通过当前节点计算得到的F值是否更小,如果更小则更新其F值,并将其父节点设置为当前节点。
如果该节点不在open列表中,则将其加入到open列表,并计算F值,设置其父节点为当前节点。
转到2步骤
进一步解释
初始节点,目标节点,分别表示路径的起点和终点,相当于上图的绿色节点和红色节点
F值,就是前面提到的启发式,每个节点都会被绑定一个F值
F值是一个估计值,用F(n) = G(n) + H(n) 表示,其中G(n)表示由起点到节点n的预估消耗,H(n)表示节点n到终点的估计消耗。H(n)的计算方式有很多种,比如曼哈顿H(n) = x + y,或者欧几里得式H(n) = sqrt(x^2 + y^2)。本例中采用曼哈顿式。
F(n)就表示由起点经过n节点到达终点的总消耗
为了便于描述,本文在每个方格的左下角标注数字表示G(n),右下角数字表示H(n),左上方数字表示F(n)。具体如何计算请看下面的一个例子
具体寻路过程
接下来,我们严格按照A*算法找出从绿色节点到红色节点的最佳路径
首先将绿色节点加入到open列表中
接着判断open列表不为空(有起始节点),红色节点不在open列表中
然后从open列表中取出F值最小的节点,此时,open列表中只有绿色节点,所以将绿色节点取出,作为当前节点,并将其加入到close列表中
计算绿色节点的相邻节点(暂不考虑斜方向移动),如下图所示的所有灰色节点,并计算它们的F值。这些子节点既没有在open列表中,也没有在close列表中,所以都加入到open列表中,并设置它们的父节点为绿色节点
F值计算方式:
以绿色节点右边的灰色节点为例
G(n) = 1,从绿色节点移动到该节点,都只需要消耗1步
H(n) = 3,其移动到红色节点需要消耗横向2步,竖向一步,所以共消耗3步(曼哈顿式)
F(n) = 4 = G(n) + H(n)
试着算一下其他灰色节点的F值吧,看看与图上标注的是否一致
继续选择open列表中F值最小的节点,此时最小节点有两个,都为4。这种情况下选取哪一个都是一样的,不会影响搜索算法的效率。因为启发式相同。这个例子中按照右下左上的顺序选取(这样可以少画几张图(T▽T))。先选择绿色节点右边的节点为当前节点,并将其加入close列表。其相邻4个节点中,有1个是黑色节点不可达,绿色节点已经被加入close列表,还剩下上下两个相邻节点,分别计算其F值,并设置他们的父节点为黄色节点。
此时open列表中F值最小为4,继续选取下方节点,计算其相邻节点。其右侧是黑色节点,上方1号节点在close列表。下方节点是新扩展的。主要来看左侧节点,它已经在open列表中了。根据算法我们要重新计算它的F值,按经过2号节点计算G(n) = 3,H(n)不变,所以F(n) = 6相比于原值反而变大了,所以什么也不做。(后面的步骤中重新计算F值都不会更小,不再赘述)
此时open列表中F值最小仍为4,继续选取
此时open列表中F值最小为6,优先选取下方节点
此时open列表中F值最小为6,优先选取右方节点
此时open列表中F值最小为6,优先选取右方节点
此时open列表中F值最小为6,优先选取右方节点
此时我们发现红色节点已经被添加到open列表中,算法结束。从红色节点开始逆推,其父节点为7号,7号父节点为6号,6号父节点为5号,5号父节点为2号(注意这里5号的父节点是2号,因为5号是被2号加入到open列表中的,且一直未被更新),2号父节点为1号,最终得到检索路径为:绿色-1-2-5-6-7-红色
A*实现的
相关问题推荐
第一步:对着Assets点击右键,选择ExportPackage第二步:选择场景文件以及和场景相关的资源或者素材,然后点击Export第三步:给导出的资源取名,并且选择要保存的位置即可
玩游戏玩的很好,说明你对于游戏里面的规则、剧情设置还是比较了解的,对于从事游戏相关岗位来说也是优势之一。但是学习游戏开发还是要对游戏开发的工作内容做进一步的了解,游戏开发涉及代码较多,可以通过进一步的了解,判断自己是否适合学习这个方向,另外...
游戏开发入门不难。后期发展需要你有丰富的奇思妙想。游戏开发肯定是培训好,自学学得不系统,并且不易发现自身薄弱之处。游戏开发的学习时长还是要看你自己对知识与技术的掌握能力,一般来说,游戏开发的学习时长大约在五个月左右。...
个人觉得如果有一定的技术基础的话还是可以考虑自学,如果零基础的话可能会有些难度
问题还是出在粒子的sorting fudge。在unity的2d模式下,游戏本身的背景相当于是sorting fudge的0,当你把粒子的sorting fudge设为0以上的时候,粒子就都会被背景盖住。所以在3d模式下给alpha正值来给add垫底的话,到了2d模式下就会通通不显示。所以遇上这样的...
虚幻4引擎,你会看到和平精英加载页面左下角有这个图标。
转载知乎上的两位答友的回答,各有道理。作者:风小锐链接:https://www.zhihu.com/question/322249959/answer/675883379来源:知乎著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。未来Unity有可能出现3A大作吗? 有可能。基于Unity已...
在Assets文件夹里面.点击右键Create/Material即可以创建材质球
可以让模型师直接作出这样的形状,如果用纯Unity制作,就要用基本游戏对象拼接了,包括楼梯,城堡,都可以拼接出来。正常情况不会这样做,因为不够精美,都是建模师来实现,毕竟Unity不属于专业的建模软件,侧重于实现功能。...
粒子系统由粒子发射器、粒子动画器和粒子渲染器三部分组成,主要用于游戏场景中一些特殊效果,如水、烟火等等
首先,Python开发游戏非常尴尬,原因是没有好用的游戏开发库。Python开发游戏仅推荐PyGame,PyGame是对多年以前很流行的游戏开发库——SDL的封装。但是说实话功能太简陋了,做个动画都得考虑刷新的问题。楼主要做简单小游戏,只需要画一两周熟悉Unity引擎,然...
1.标记水体碰撞的位置2.计算水波的传递 通过波动公式,3D或者2D 波动公式都行3.水面顶点采样波动传递结果计算结果做顶点Y轴偏移
Unity3D中两种阴影的实现传统的ShadowMapShadowMap说起来十分简单,把摄像机和光源的位置重叠,那么场景中该光源的阴影区域就是那些摄像机看不到的地方,主要应用在前向渲染路径中。具体实现分以下几个步骤:如果有平行光开启了阴影,Unity就会为该光源计算它...
Doozy UI是Unity UI视图层的框架,本身使用的还是UGUI的组件,但提供了一套强大的UI管理功能,可以很方便的实现一些炫酷效果,方便的UI系统管理与事件传递机制。
Unity3d更好,因为U3D占有的市场更大,目前cocos大都是用来开发棋牌游戏的,在这方面它有着巨大的优势。而Unity3d既可以用来开发大型3D游戏,也可以用来开发vr游戏、vr应用,这是比较不错的,未来有着巨大的前景。另外ue4也是个不错的选择,近年来用ue4开发的...
当Unity 需要做热更新的时候(2013年开始),而普通的C#又做不到的时候,而对于游戏行业来说Lua脚本热更新已经是很成熟的方案,自然Lua 热更新就成为了Unity热更新的首选。